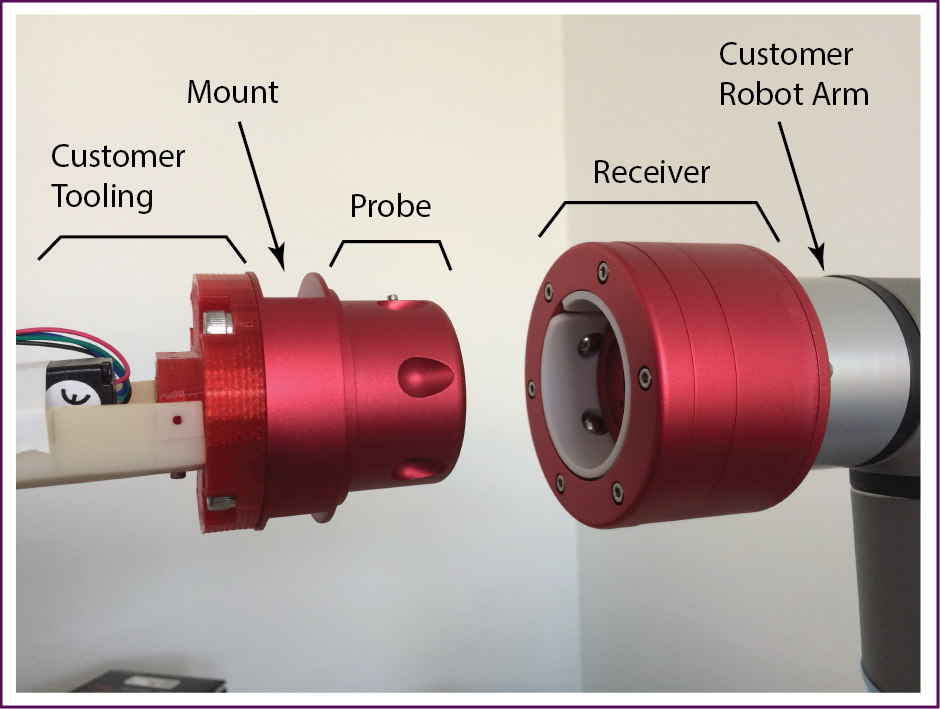
MAGE allows ordinary pick-and-place robots/cobots to become multitasking robots able to use different tooling for each task.
As an example, the robot could start with a grasper toolhead and after the part is located, Mage then switches to a
drill tool, drills a hole, then switches back to a grasper tool to place a post in the part. Finally, the grasper tool
moves the completed part to the proper bin.
Mage was originally designed to operate in the ISS Microgravity Glovebox to assist astronauts in performing rodent
experiments by allowing ground-based researchers to conduct experiments while the astronauts were
performing other tasks.
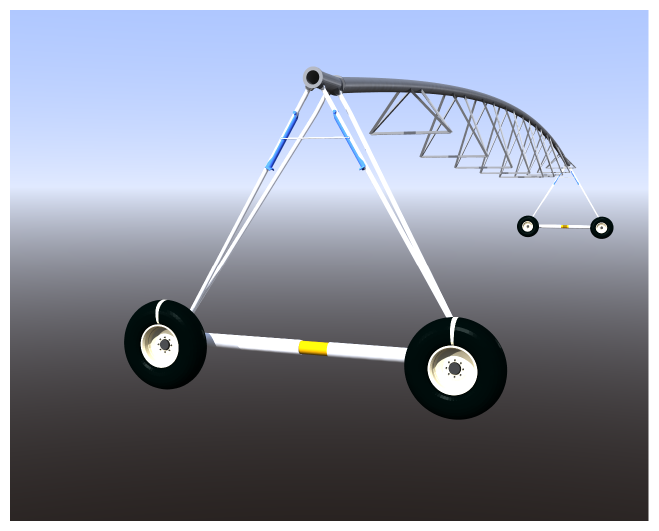
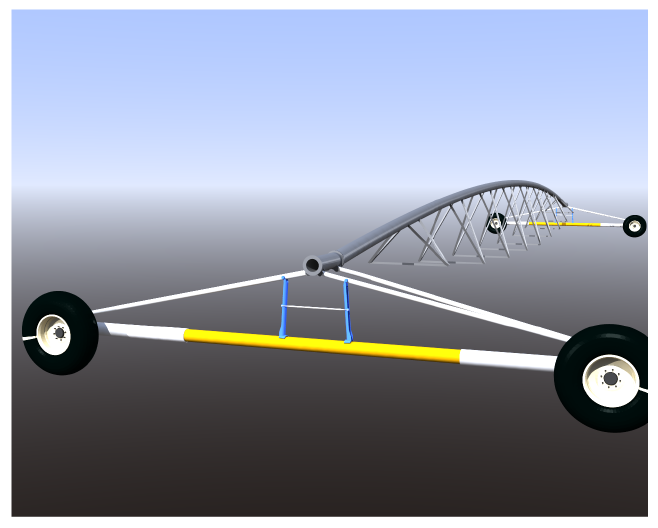
ZEPHYR was the result of observing several tumbled and ruined irrigation pivots following a windstorm.
The objective of Zephyr is lower itself automatically when high winds are detected, thus reducing the frontal
area of the span and increasing the fulcrum lever arm, making tipping the pivot over more difficult.
Following the high wind event, Zephyr will lift itself back-up and resume irrigation automatically.